
Partager cette page :






Dynamique, redondance, sous actionnement, autonomie: la robotique humanoïde, cas d'étude de la robotique moderne
le 14 mars 2014
de 10h00 à 12h00
ENS Rennes Salle du Conseil
Plan d'accès
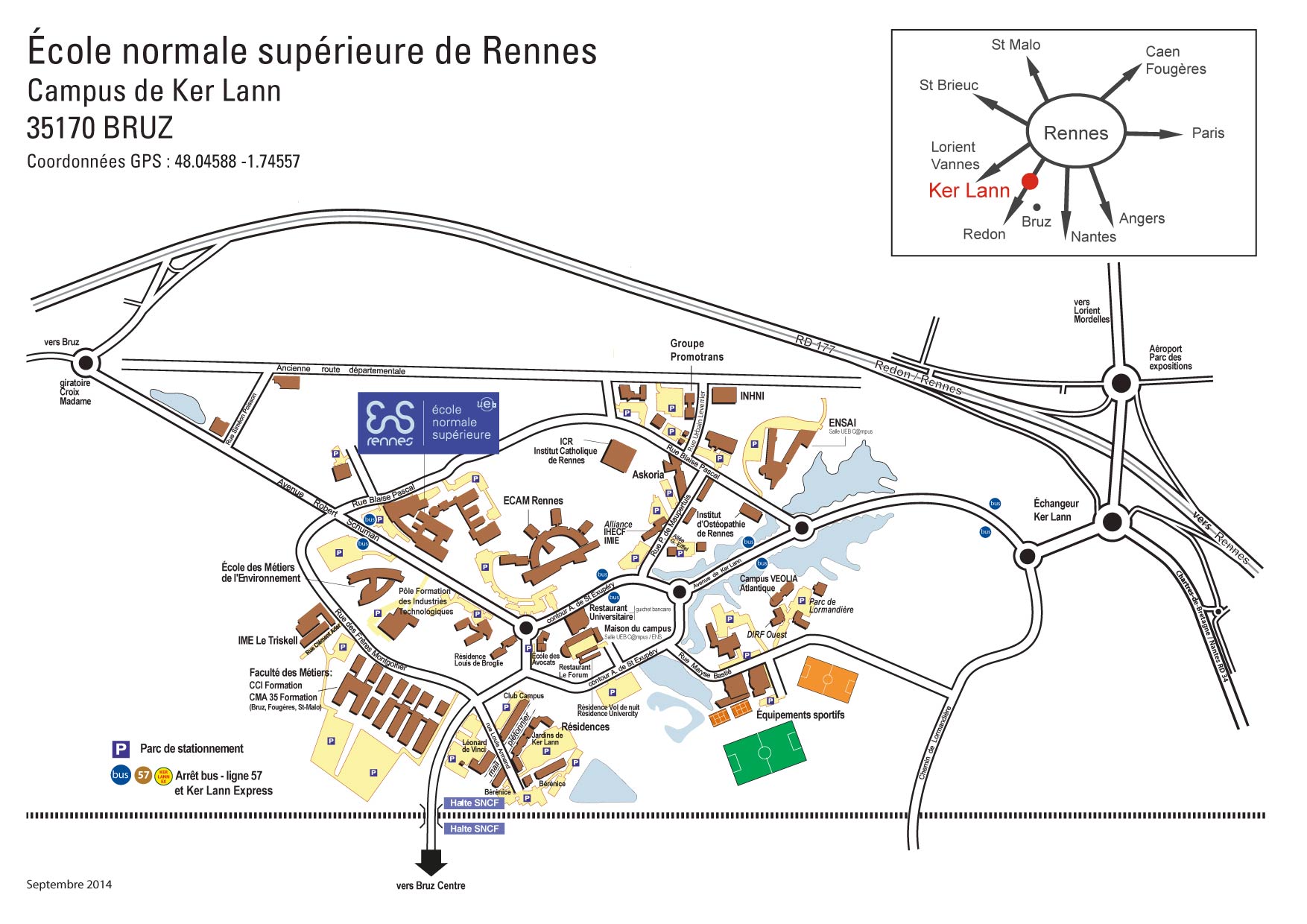{kind=link}
Intervention de Nicolas MANSARD, chercheur CNRS au LAAS Toulouse, dans le cadre des séminaires du Magistère mécatronique.
La robotique est une discipline qui a dernièrement évolué tes rapidement, notamment sous l'effet de nombreux apports technologiques. Les capacités de prototypage mécanique, doublées d'une maturité de l'électronique d'actionnement, de perception et de contrôle, permettent d'explorer des formes mécatroniques originales et toujours plus complexes. Les mathématiques du contrôle et les algorithmes de la planification, bénéficiant de l'augmentation des capacités de calcul (fréquence et quantité de cœur de calcul), permettent d'exploiter partiellement cette diversité mécanique. Le savoir faire en modélisation, notamment les progrès en apprentissage automatique, fait le lien entre les prototypes mécaniques et le contrôle, et ouvre de nouvelles manières de concevoir nos algorithmes.
Cet exposé présentera une vue d'ensemble de ces questions, en les illustrant d'applications. L'objectif est de donner une image large du domaine de la robotique, de ces capacités opérationnelles actuelles et des perspectives ouvertes aux recherches académiques et industrielles à court et moyen termes.
Cette conférence s'adresse essentiellement aux magistériens du département Mécatronique mais elle est ouverte à tous ceux que le sujet intéresse de près ou de loin !
- Thématique(s)
- Recherche - Valorisation
- Partenaires
- http://www.aldebaran-robotics.com/
- Contact
- Hamid Ben Ahmed
Mise à jour le 14 mars 2014