
Partager cette page :





Microsystèmes & microcapteurs
L’évolution des technologies numériques a, depuis peu, permis d’envisager un approfondissement de l’analyse du mouvement humain et de son environnement. Les objectifs sont donc de concevoir des systèmes avec de nouvelles fonctionnalités pour convertir un signal mécanique, physique, chimique ou biologique en signal électrique pour la mesure, l’enregistrement, le suivi et la transmission de paramètres issus d’un mouvement et/ou de son environnement. Les enjeux scientifiques se situent sur la chaine complète du domaine des matériaux jusqu’au système. Les défis sociétaux et marchés applicatifs sont la santé, l’activité physique et l’environnement.
Objectif 1 : Mise en œuvre d’une méthodologie de développement de nouveaux transducteurs, matériaux, microtechnologies et électronique associée.
Les verrous sont :- Microtechnologies sur substrats divers (rigides, flexibles, organiques, inorganiques, biosourcés),
- Microcapteurs pour applications mécaniques, électrochimiques, chimiques, biologiques,
- Systèmes embarqués ou portés communicants.
- transducteurs bio-sourcés et biodégradables dans le cadre du suivi de polymérisation d’un polymère biocompatible (PDMS),
- transducteurs électrochimiques, notamment dans le cadre du développement d’un outil dédié à la détection du plomb et du cadmium dans l’eau, qui a permis de multiplier par 300 l’intensité du courant détecté par des méthodes classiques,
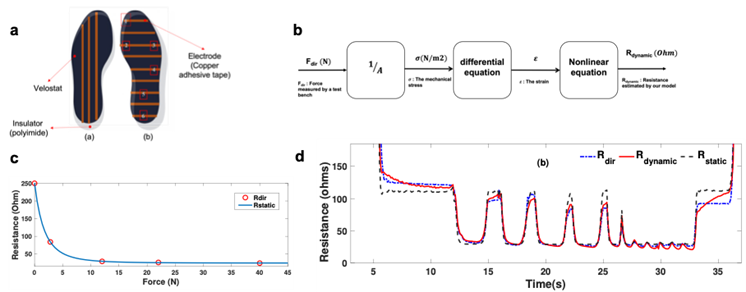
- transducteurs électromécaniques. Des systèmes piézoélectriques et piézo-résistifs multi-électrodes sont mis au point pour permettre de suivre les paramètres mécaniques. Deux types d’application sont concernées : (1) le suivi de biomatériaux comme la polymérisation des protéines impliquées dans les maladies du type Alzheimer pour la compréhension des mécanismes de la maladie et une détection précoce, (2) la pression plantaire en fonction du mouvement grâce à la mise au point de transducteurs piézo-résistifs sur substrat souple et de leur modélisation (cf. figure ci-après).
Figure : a) Schéma d’une semelle piézo-résistive avec les électrodes et les zones d’intérêt de mesure de l’effort plantaire, b) modèle viscoélastique non linéaire du capteur, c) caractéristique statique du capteur, et d) réponse dynamique de l’effort de référence, du capteur avec modèle dynamique inverse et du modèle statique.
Objectif 2 : Mise en œuvre d’une méthodologie de développement de nouveaux systèmes d’analyse du mouvement.
L’enjeu repose ici sur le nombre de fonctions à intégrer tant au niveau des propriétés mécaniques, que chimiques et électriques.Les verrous sont :
- la constitution de bases de données et apprentissage,
- le placement et la configuration des capteurs,
- le traitement du signal,
- le développement de systèmes portés communicants et énergétiquement autonomes.
- système de reconnaissance du mouvement humain, notamment pour la modélisation de capteurs électromécaniques (IMU), associé à des outils de synthèse des données de capteurs et de reconnaissance du mouvement par apprentissage automatique,
- système de suivi du mouvement d’un corps immergé réalisé en commun avec l’axe 2.
Mise à jour le 1 décembre 2023
à la une
- La recherche Mécatronique sur YoutubeLe 27 février 2024Découvrez les dernières avancées des travaux de recherche du département Mécatronique de l'École normale supérieure de Rennes sur la chaine Youtube dédiée. Les chercheurs et chercheuses du département y reprennent les contenus de différents articles scientifiques ou conférences auxquelles ils ont participé.

